Our Research
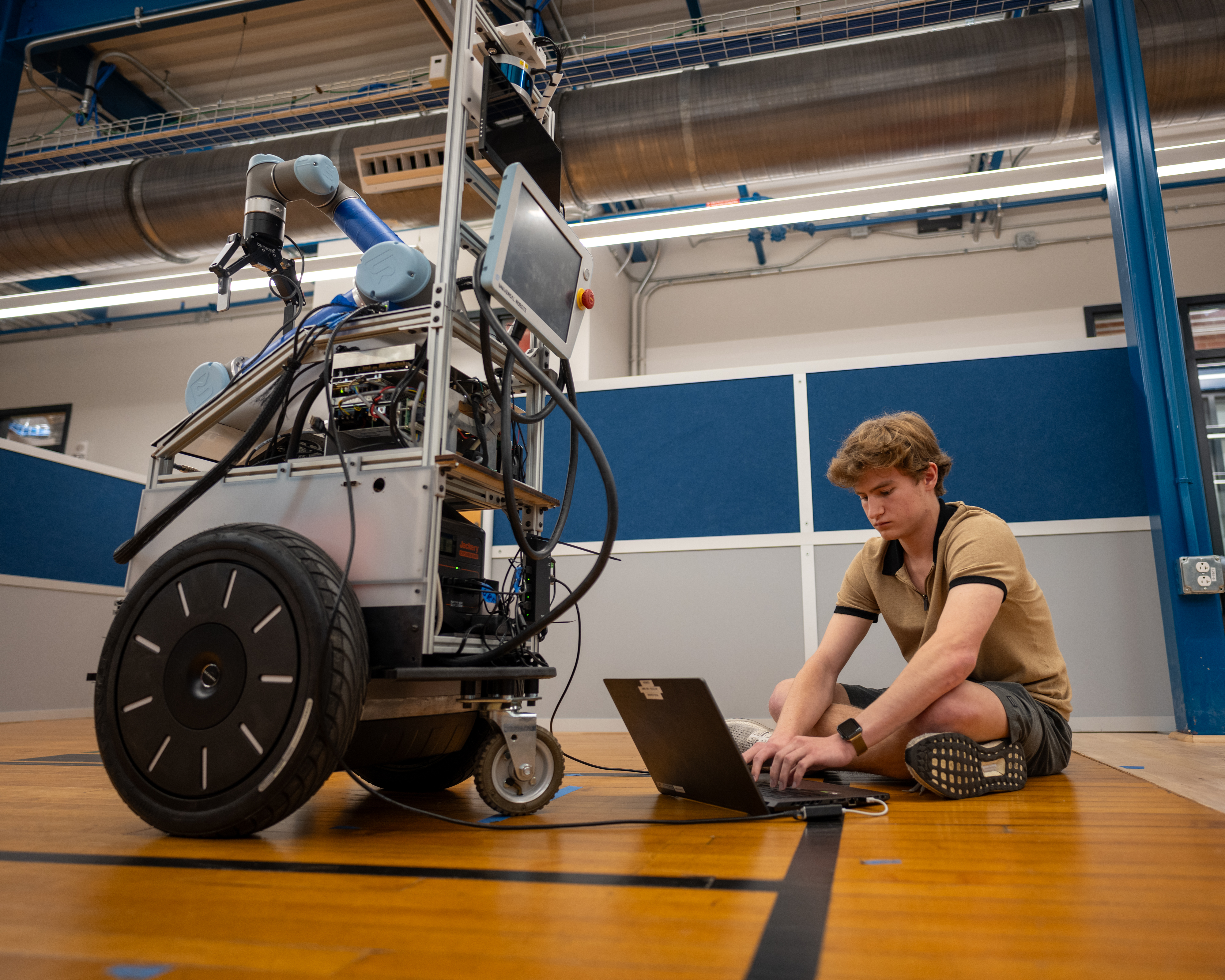
The promise of broadly-available, highly-capable, general-purpose service robots has been only ten years away for the past 70 years. Such robots would assist people in day-to-day tasks, ranging from deliveries in offices to assisting around the home. Despite audacious promises, significant research lies between the current state of the art and the goal of general-purpose service robots.
The challenge of making these machines work well around people and in homes and offices -spaces designed for people -requires significant advances in artificial intelligence and human-robot interaction.
Our goal is to carry out laboratory research in pursuit of broadly capable service robots and to answer the following queries:
- What are the key capabilities necessary for such robots?
- How will these capabilities be implemented?
Autonomous Robots Research Projects
- Social Navigation. Autonomous vehicles follow traffic laws, but people walking in hallways, offices, and pedestrian spaces use social cues such as body language and gaze to coordinate their behavior. This research looks at leveraging such social cues in robot behavior to make robots gracefully navigate around people.
- Semantic Mapping. The typical maps used by robots only indicate where a robot can navigate, not the meaning of the space. A programmer can specify, “Go to coordinate x,y,z,” but getting the robot to navigate to the mail-room requires specifying the link between the coordinate and that space. Semantic mapping adds meaning to locations and things seen in the robot’s environment.
Our Strategy
Our researchers learn techniques in the field of robotics as well as teamwork, peer-review, and written and verbal scientific communication.
Students prepare a research proposal, participate in collaborative laboratory research pursuing our project goals, and present their data at a stream student conference.
Exceptional work can be further developed by students who wish to continue their research efforts after the course sequence, and prepare for publication in scientific conferences such as IROS, ICRA, AAAI, IJCAI, ICSR, and RO-MAN.
In the Autonomous Robotics Stream, we focus on:
- the Robot Operating System (ROS)
- how to safely operate robots
- robotics topics, such as mathematical reasoning about spatial transformations
- discerning what makes "good robotics research"
- synthesizing new research ideas and manuscript preparation
Our Impact
We investigate artificial intelligence and human-robot interaction in pursuit of the development of systems for general-purpose service robots.
Our research represents the family of technologies that must be built to move robots from specialized spaces, such as warehouses and factories, into spaces designed for people, such as offices and homes. We aim to contribute the knowledge required to realize general-purpose service robots.
Our Team

Justin Hart
- Assistant Professor of Practice
- Freshman Research Initiative
- College of Natural Sciences
- Computer Science
Research Educator | Autonomous Robots Stream

Peter Stone
- Professor
- Department Chair
- Head of School Designate
- Computer Science
Founding Director, Texas Robotics
Truchard Foundation Chair in Natural Sciences
David Bruton, Jr. Centennial Professor
Distinguished Teaching Professor
Resources
Course Credit
Research Outcomes
- Blake Holman, Abrar Anwar, Akash Singh, Mauricio Tec, Justin Hart, and Peter Stone. Watch Where You’re Going! Gaze and Head Orientation as Predictors for Social Robot Navigation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Xi’an,China. May 30-June 5, 2021.
- Justin Hart, Reuth Mirsky, Xuesu Xiao, Stone Tejeda, Bonny Mahajan, Jamin Goo, Kathryn Baldauf, Sydney Owen, and Peter Stone. Using Human-Inspired Signals to Disambiguate Navigational Intentions. In Proceedings of the International Conference on Social Robotics (ICSR). Golden, Colorado. November 14-16, 2020.
- Justin Hart, Rishi Shah, Sean Kirmani, Nick Walker, Kathryn Baldauf, Nathan John, and Peter Stone. PRISM: Pose Registration for Integrated Semantic Mapping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain. October 1-5, 2018.